







- 发表时间:2015/12/19 文章来源:深圳市肯嘉科技有限公司
- 一、发动机缸体上下料机器人
要求用一台机器人同时给四台加工中心进行上料和下料工作。从加工中心门开后14秒之内要取下工作台工装上的缸体及换上要加工的缸体。整套系统还要有毛坯缸体供料线和下料线,全自动工作。水平轴的运行速度是2米/秒,而上下轴的运行速度要达到1米/秒。
图1和图2分别是工作现场的机器人和要抓取得零件照片。其中水平运动轴的整体长度达到50米,采用SP300型号的直线运动单元。采用伺服电机配减速机作为驱动,采用齿轮齿条传动。由于壳体的重量大体积大,不宜采用单上下运动轴双手爪结构。为了保证14秒的卸装节拍要求,采用双Z轴及双手爪方式。两根Z轴的型号是AP200,它们一起随X轴做水平运动,但可以单独做垂直运动。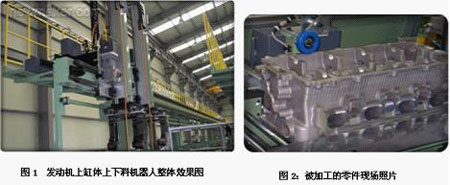
 图3是对重量轻些的发动机壳体自动上下料机器人现场照片。整套机器人总长达到了25米,分别对四台机床进行上下料工作,同样采用H型双Z轴双手爪结构。由于重量轻,Z轴选择AP160。在机械强度上,搬运能力上,驱动能力,转动惯量比等都留有较大的余量,确保机器人的刚性好,强度大,高速和低速都运行平稳,加速和减速停止过程中不会产生晃动和爬行等。由于两种机器人的结构和工作过程几乎完全一样,所以就介绍一些主要部分。
图3是对重量轻些的发动机壳体自动上下料机器人现场照片。整套机器人总长达到了25米,分别对四台机床进行上下料工作,同样采用H型双Z轴双手爪结构。由于重量轻,Z轴选择AP160。在机械强度上,搬运能力上,驱动能力,转动惯量比等都留有较大的余量,确保机器人的刚性好,强度大,高速和低速都运行平稳,加速和减速停止过程中不会产生晃动和爬行等。由于两种机器人的结构和工作过程几乎完全一样,所以就介绍一些主要部分。
机器人手爪:由于发动机缸体表面形状特殊不平,采用大行程气动双指手爪。手爪闭合时手指能钩住发动机缸体两侧的凹槽,增多摩擦系数,确保杠体能被平稳抓起及运动,还能确保它的方位精度。通过两侧的凹槽勾取住发动机缸体,不会发生夹取时下滑的现象。
手爪上带有夹紧到位传感器,手爪张开到位传感器和手爪中有无壳体传感器。确保抓取和放下零件的可靠性。手爪同时有断气保护机构,确保断电,断气时,能保持一段时间内夹住缸体,避免缸体突然从手爪中掉落下来。
控制系统:
两种发动机壳体上下料机器人系统的控制系统采用的是西门子的数控系统,西门子公司的伺服电机,扭卡特公司的精密行星减速机。整个控制系统带有自动运行,手动操作运行,示教运行,诊断功能,单步运行等功能。不仅可靠性高,而且调式和编程方便。采用德国产传感器,对一些关键位置都有传感器,确保不会发生运动不到位,发生碰撞等。整套运动采用严格的依赖传感器信号来运动,一些运动仅在有传感器信号才可以,实现一些运动的互锁,确保绝对安全,长期可靠工作。
自动注油泵:
由于上下料机器人必须高速运行,长期昼夜高效高频率工作,水平轴和垂直轴的滑块,齿轮齿条必须周期性定量注油。这样才能保证机器人高速,低噪声,长期运行。
安全防护通道:
上下料机器人的水平轴和垂直轴长期高速运动,快速抓取刚加工完的零件。这时的壳体上有切削液。不加以防护就会向四周飞溅。安全防护通道是U字形钢板,它安装在X轴前下方Z轴下面。安全防护通道仅在机床工作台上方手爪上下运动,抓毛坯处,放置壳体处留有窗口,确保Z轴和手爪仅在特定位置能上下运动。这样不仅可以防止切削液的飞溅,收集引导切削液,还能保护机床不受机器人误动作和零件脱落对机床造成的损伤。
检修和维护通道:
为了确保上下料机器人能长期,稳定可靠地工作,要对机器人周期性检查防护,保养。而机器人桁架及上门的水平运动轴通常很高,而上下运动轴的最高端可能要达到5米多高。为了维护的方案,在机器人桁架后面安装一与机器人几乎一样长,大约1米宽,带护栏的维护维修通道。以便维修保养人员在上面行走。为了方便维修保养人员的上下通常两端配有上下用梯子。
上下料工作过程:
当我们要对一台机床进行上下料时,我们可以采用一个Z轴及手爪抓取未加工的毛坯料,另一个Z轴及所带的手爪处于空闲状态,整个机械手处于等待机床信号状态。机械手接收到机床门开启到位信号后,机械手空闲手爪运动到加工好的缸体上方,并下降及抓取加工好的缸体后。然后快速上升到机场门上方及移动一个小距离使另一个抓有毛坯的Z轴快速下降及把毛坯杠体放置到工作台的工装上。空手爪的Z轴快速上升到机床防护罩外面,通知机床关门及开始加工。整个取下杠体,换上新毛坯缸体及手爪运动出机床防护罩外面的时间小于14秒。到此完成了下料和上料过程。然后把刚取下的缸体放到下个工位上进行下道工序的加工或移放到下料处。到此完成一台机床的全部上料和下料过程。由于一个机器人给多台机床同时上下料,所以完成任意一台机床的整个上下料过程不能超过30秒。
自动上下料直角坐标机器人
上一篇:自动真空上料机原理和作用